题目列表(包括答案和解析)
| 1 |
| 8T2 |
| 1 |
| 8T2 |

 如图所示,一质量为m的重物放在水平地面上,上端用一根轻弹簧相连.现用手拉弹簧的上端P缓慢向上移动.当P点位移为H时,物体离开地面一段距离h,则在此过程中( )
如图所示,一质量为m的重物放在水平地面上,上端用一根轻弹簧相连.现用手拉弹簧的上端P缓慢向上移动.当P点位移为H时,物体离开地面一段距离h,则在此过程中( )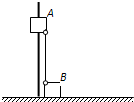 如图所示,滑块A、B的质量均为m,A套在固定竖直杆上,A、B通过转轴用长度为L的刚性轻杆连接,B放在水平面上并靠着竖直杆,A、B均静止.由于微小的扰动,B开始沿水平面向右运动.不计一切摩擦,滑块A、B视为质点.在A下滑的过程中,下列说法中正确的是( )
如图所示,滑块A、B的质量均为m,A套在固定竖直杆上,A、B通过转轴用长度为L的刚性轻杆连接,B放在水平面上并靠着竖直杆,A、B均静止.由于微小的扰动,B开始沿水平面向右运动.不计一切摩擦,滑块A、B视为质点.在A下滑的过程中,下列说法中正确的是( )
| 1 |
| 2 |
| d |
| △t2 |
| 1 |
| 2 |
| d |
| △t1 |
| 1 |
| 2 |
| d |
| △t2 |
| 1 |
| 2 |
| d |
| △t1 |
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com