题目列表(包括答案和解析)
|
| 2gμx2 |
|
| 2gμx2 |
2 2 |
2 1 |
| 次数 | M1/kg | |v
|
△E/J | F/N | W/J | ||||
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 | ||||
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 | ||||
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 | ||||
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 | ||||
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
 某实验室可利用拉力传感器和速度传感器探究“动能定理”.如图,他们将拉力传感器固定在小车上,用不可伸长的轻细线将其通过一个定滑轮与钩码相连,用速度传感器记录小车通过A、B时的速度大小中车中可以放置砝码.
某实验室可利用拉力传感器和速度传感器探究“动能定理”.如图,他们将拉力传感器固定在小车上,用不可伸长的轻细线将其通过一个定滑轮与钩码相连,用速度传感器记录小车通过A、B时的速度大小中车中可以放置砝码.| v | 2 2 |
| v | 2 1 |
| 次数 | M/kg | |
|
△E/J | F/N | W/J | ||||
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 | ||||
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 | ||||
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 | ||||
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 | ||||
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |

| v | 2 2 |
| 次数 | M/kg | |
|
△E/J | F/N | W/J | ||
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 | ||
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 | ||
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 | ||
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 | ||
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
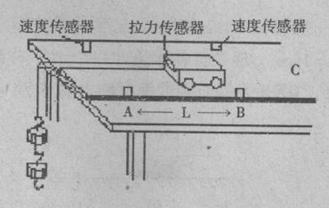
实验室可利用拉力传感器和速度传感器探究“动能定理”。如图12,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用速度传感器记录通过A、B时的速度大小。小车中可以放置砝码。
(1)实验主要步骤如下:
①测量__________和拉力传感器的总质量![]() ;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在靠右方的C点,接通电源后释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度。
③在小车中增加砝码,或___________,重复②的操作。
(2)下表是他们测得的一组数据,其中M是M1与小车中砝码质量之和,![]() 是两个速度传感器记录速度的平方差,可以据此计算出动能变化量
是两个速度传感器记录速度的平方差,可以据此计算出动能变化量![]() ,F是拉力传感器受到的拉力,W是F在A、B间所作的功。表格中的ΔE3=_________,W3=________。(结果保留三位有效数字)
,F是拉力传感器受到的拉力,W是F在A、B间所作的功。表格中的ΔE3=_________,W3=________。(结果保留三位有效数字)
(3)根据下表,请在右图中的方格纸上作出![]() 图线。
图线。

(10分)某实验室可利用拉力传感器和速度传感器探究“动能定理”。如图,他们将拉力传感器固定在小车上,用不可伸长的轻细线将其通过一个定滑轮与钩码相连,用速度传感器记录小车通过A、B时的速度大小中车中可以放置砝码。
(1)实验主要步骤如下:
①测量小车(包括拉力传感器)的质量M1;把细线的一端固定在拉力传感器上,另一端通过定滑轮与钩码相连;正确连接所需电路;
②将小车停在靠右方的C位置,接通电源后释放小车,小车在细线拉动下运动,记录细线拉力及小车通过A、B时的速度。
③在小车中增加砝码或 重复②的操作。
(2)下表是他们测得的一组数据,其中M是M1与小车中砝码质量之和, 是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间对小车所作的功。表格中的△E3=
,W3=
。(结果保留三位有效数字)
是两个速度传感器记录速度的平方差,可以据此计算出动能变化量△E,F是拉力传感器受到的拉力,W是F在A、B间对小车所作的功。表格中的△E3=
,W3=
。(结果保留三位有效数字)
(3)分析下表,在误差范围内你可以得到的结论是 ;造成误差的原因 。
数据记录表
|
次数 |
M/kg |
|
△E/J |
F/N |
W/J |
|
1 |
0.500 |
0.760 |
0.190 |
0.400 |
0.200 |
|
2 |
0.500 |
1.65 |
0.413 |
0.840 |
0.420 |
|
3 |
0.500 |
2.40 |
△E1 |
1.220 |
W3 |
|
4 |
1.000 |
2.40 |
1.20 |
2.420 |
1.21 |
|
5 |
1.000 |
2.84 |
1.42 |
2.860 |
1.43 |
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com