 利用速度传感器与计算机结合,可以自动作出物体运动的图象.如图所示,是某次实验中得到的小车运动的部分v-t图象,由此可以知道小车在第1s内发生的位移大约是
利用速度传感器与计算机结合,可以自动作出物体运动的图象.如图所示,是某次实验中得到的小车运动的部分v-t图象,由此可以知道小车在第1s内发生的位移大约是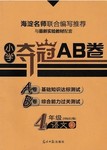 小学夺冠AB卷系列答案
小学夺冠AB卷系列答案科目:高中物理 来源: 题型:阅读理解

| 次数 | M/kg | |v12-v22|/m2s-2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
查看答案和解析>>
科目:高中物理 来源: 题型:
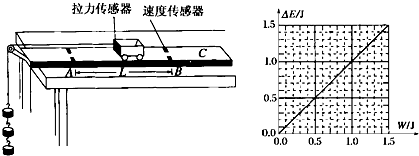
 某兴趣小组利用拉力传感器和速度传感器“验证动能定理”.如图甲所示.他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连接用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B两点的速度大小.小车中可以放置砝码.
某兴趣小组利用拉力传感器和速度传感器“验证动能定理”.如图甲所示.他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连接用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器,记录小车通过A、B两点的速度大小.小车中可以放置砝码.
| 次数 | M/kg | |
|
△E/J | F/N | W/J | ||||
| 1 | 0.500 | 0.760 | 0.190 | 0.600 | 0.300 | ||||
| 2 | 0.500 | 1.65 | 0.413 | 1.040 | 0.520 | ||||
| 3 | 0.500 | 2.40 | △E3 | 1.420 | W3 | ||||
| 4 | 1.000 | 1.60 | 0.80 | 2.300 | 1.15 | ||||
| 5 | 1.000 | 2.40 | 1.20 | 2.620 | 1.31 | ||||
| 6 | 1.000 | 2.84 | 1.42 | 3.060 | 1.53 |
| v | 2 2 |
| v | 2 1 |
查看答案和解析>>
科目:高中物理 来源: 题型:阅读理解
 某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.
某实验小组利用拉力传感器和速度传感器探究“动能定理”,如图,他们将拉力传感器固定在小车上,用不可伸长的细线将其通过一个定滑轮与钩码相连,用拉力传感器记录小车受到拉力的大小.在水平桌面上相距50.0cm的A、B两点各安装一个速度传感器记录小车通过A、B时的速度大小.小车中可以放置砝码.| 次数 | M/kg | |v22-v21|/(m/s)2 | △E/J | F/N | W/J |
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 |
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 |
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 |
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 |
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
查看答案和解析>>
科目:高中物理 来源: 题型:阅读理解
| v | 2 2 |
| 次数 | M/kg | |
|
△E/J | F/N | W/J | ||
| 1 | 0.500 | 0.760 | 0.190 | 0.400 | 0.200 | ||
| 2 | 0.500 | 1.65 | 0.413 | 0.840 | 0.420 | ||
| 3 | 0.500 | 2.40 | △E3 | 1.220 | W3 | ||
| 4 | 1.000 | 2.40 | 1.20 | 2.420 | 1.21 | ||
| 5 | 1.000 | 2.84 | 1.42 | 2.860 | 1.43 |
查看答案和解析>>
科目:高中物理 来源: 题型:
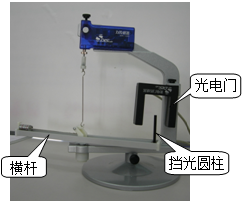 光电门传感器在很多实验中应用.光电门直接测量的物理量是
光电门传感器在很多实验中应用.光电门直接测量的物理量是| n | t(10-3s) | v=d/t(m/s) | v2(m2/s2) |
| 1 | 2.778 | 1.80 | 3.24 |
| 2 | 2.826 | … | 3.13 |
| 3 | 2.877 | … | 3.02 |
| 4 | 2.931 | … | 2.91 |
| 5 | 2.988 | … | |
| 6 | 3.049 | … | 2.69 |
| 7 | 3.113 | … | 2.58 |
| 8 | 3.181 | … | 2.47 |
| 9 | 3.255 | … | 2.36 |
| 10 | 3.333 | … | 2.25 |
| … | … | … | … |
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com
