题目列表(包括答案和解析)
如图(a)所示,“![]() ”型木块放在光滑水平地面上,木块的水平表面AB粗糙,与水平面夹角
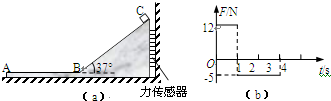
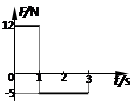
”型木块放在光滑水平地面上,木块的水平表面AB粗糙,与水平面夹角![]() =37°的表面BC光滑.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.(已知sin37°=0.6,cos37°=0.8,取g=10 m/s2.)求:
=37°的表面BC光滑.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.(已知sin37°=0.6,cos37°=0.8,取g=10 m/s2.)求:
(1)斜面BC的长度L;
(2)滑块的质量m;
(3)运动过程中滑块克服摩擦力做的功W.
![]() 如图(a)所示,“ ”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求:
如图(a)所示,“ ”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求:
(1)斜面BC的长度;
(2)滑块的质量;
(3)运动过程中滑块克服摩擦力做的功.
 |
 |
|
(18分)如图(a)所示,“![]() ”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求:
”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求:
(18分)如图(a)所示,“![]() ”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求:
”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求:


(1)斜面BC的长度;
(2)滑块的质量;
(3)运动过程中滑块克服摩擦力做的功
(18分)如图(a)所示,“ ”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求:
”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求:
(18分)如图(a)所示,“”型木块放在光滑水平地面上,木块水平表面AB粗糙,光滑表面BC且与水平面夹角为θ=37°.木块右侧与竖直墙壁之间连接着一个力传感器,当力传感器受压时,其示数为正值;当力传感器被拉时,其示数为负值.一个可视为质点的滑块从C点由静止开始下滑,运动过程中,传感器记录到的力和时间的关系如图(b)所示.已知sin37°=0.6,cos37°=0.8,g取10m/s2.求: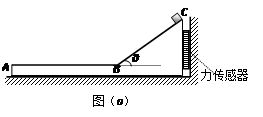
(1)斜面BC的长度;
(2)滑块的质量;
(3)运动过程中滑块克服摩擦力做的功
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com