题目列表(包括答案和解析)
物理小组用自己设计的位移传感器来探究滑块的简谐运动,其工作原理如图(a)所示,滑块M在导轨上平移时,带动滑动变阻器的滑片P一起平移,利用示波器获得的U—t图像可以反映滑块M的位移x的变化情况。已知电源电动势为E,内阻不计,滑动变阻器的滑片从A端滑到B端的总长为L,滑块位于O点时滑片P恰与AB的中点接触。滑块M以O为平衡位置做简谐运动(取向右为正方向)振幅为。若U随时间t的变化关系如图(b)所示,则在图示0—t1时间内,下列说法正确的是
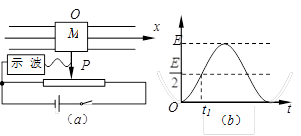
A.滑块M的速度为正方向且不断增大
B.滑块M的速度为负方向且不断减小
C.滑块M的加速度为正方向且不断增大
D.滑块M的加速度为负方向且不断减小
物理小组用自己设计的位移传感器来探究滑块的简谐运动,其工作原理如图(a)所示,滑块M在导轨上平移时,带动滑动变阻器的滑片P一起平移,利用示波器获得的U—t图像可以反映滑块M的位移x的变化情况。已知电源电动势为E,内阻不计,滑动变阻器的滑片从A端滑到B端的总长为L,滑块位于O点时滑片P恰与AB的中点接触。滑块M以O为平衡位置做简谐运动(取向右为正方向)振幅为 。若U随时间t的变化关系如图(b)所示,则在图示0—t1时间内,下列说法正确的是
。若U随时间t的变化关系如图(b)所示,则在图示0—t1时间内,下列说法正确的是

A.滑块M的速度为正方向且不断增大
B.滑块M的速度为负方向且不断减小
C.滑块M的加速度为正方向且不断增大
D.滑块M的加速度为负方向且不断减小
物理小组用自己设计的位移传感器来探究滑块的简谐运动,其工作原理如图(a)所示,滑块M在导轨上平移时,带动滑动变阻器的滑片P一起平移,利用示波器获得的U—t图像可以反映滑块M的位移x的变化情况。已知电源电动势为E,内阻不计,滑动变阻器的滑片从A端滑到B端的总长为L,滑块位于O点时滑片P恰与AB的中点接触。滑块M以O为平衡位置做简谐运动(取向右为正方向)振幅为 。若U随时间t的变化关系如图(b)所示,则在图示0—t1时间内,下列说法正确的是
。若U随时间t的变化关系如图(b)所示,则在图示0—t1时间内,下列说法正确的是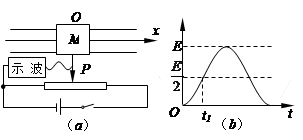
| A.滑块M的速度为正方向且不断增大 |
| B.滑块M的速度为负方向且不断减小 |
| C.滑块M的加速度为正方向且不断增大 |
| D.滑块M的加速度为负方向且不断减小 |
 如图甲所示,线圈A、B紧靠在一起,当给线圈A通以如图乙所示的电流(规定由a进入b流出为电流正方向)时,则电压表的示数变化情况(规定电流由c进入电压表为正方向)应为下列图中的( )
如图甲所示,线圈A、B紧靠在一起,当给线圈A通以如图乙所示的电流(规定由a进入b流出为电流正方向)时,则电压表的示数变化情况(规定电流由c进入电压表为正方向)应为下列图中的( )湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com