题目列表(包括答案和解析)
如图6所示,在竖直向下的匀强磁场中,有两根竖直 放置的平行导轨AB、CD,导轨上放有质量为m的金属棒MN,棒与导轨间的动摩擦因数为μ,现从t=0时刻起,给棒通以图示方向的电流,且电流大小与时间成正比,即I=kt,其中k1为正恒量.若金属棒与导轨始终垂直,则如图7所示的表示棒所受的摩擦力随时间变化的四幅图中,正确的是 ( )
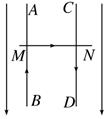
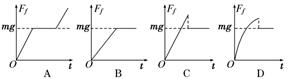
如图6所示,在竖直向下的匀强磁场中,有两根竖直 放置的平行导轨AB、CD,导轨上放有质量为m的金属棒MN,棒与导轨间的动摩擦因数为μ,现从t=0时刻起,给棒通以图示方向的电流,且电流大小与时间成正比,即I=kt,其中k1为正恒量.若金属棒与导轨始终垂直,则如图7所示的表示棒所受的摩擦力随时间变化的四幅图中,正确的是 ( ) 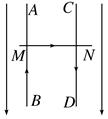
如图所示,在竖直向下的匀强磁场中,有两根竖直 放置的平行导轨AB、CD,导轨上放有质量为m的金属棒MN,棒与导轨间的动摩擦因数为μ,现从t=0时刻起,给棒通以图示方向的电流,且电流大小与时间成正比,即I=kt,其中k1为正恒量.若金属棒与导轨始终垂直,则如图7所示的表示棒所受的摩擦力随时间变化的四幅图中,正确的是 ( ) 图6
图7
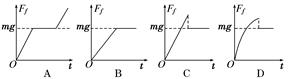
如图所示,在竖直向下的匀强磁场中,有两根竖直 放置的平行导轨AB、CD,导轨上放有质量为m的金属棒MN,棒与导轨间的动摩擦因数为μ,现从t=0时刻起,给棒通以图示方向的电流,且电流大小与时间成正比,即I=kt,其中k1为正恒量.若金属棒与导轨始终垂直,则如图7所示的表示棒所受的摩擦力随时间变化的四幅图中,正确的是 ( ) 图6
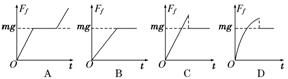
图7
2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上。中国科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军。改写了我国服务机器人从未进人世界前5的纪录.标志着我国在该领域的研究取得了重要进展。图中是科大著名服务机器人“可佳”,如图所示。现要执行一项任务,给它设定了运动程序。图甲所示为“可佳”做直线运动的v-t图像.若将“可佳”的运动过程用x-t图像表示出来(其中x为物体相对出发点的位移),则图乙中的四幅图描述正确的是(???? )

湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com