题目列表(包括答案和解析)
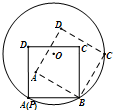 设圆O的半径为2,点P为圆周上给定一点,如图所示,放置边长为2的正方形ABCD(实线所示,正方形的顶点A与点P重合,点B在圆周上).现将正方形ABCD沿圆周按顺时针方向连续滚动,当点A首次回到点P的位置时,点A所走过的路径的长度为( )
设圆O的半径为2,点P为圆周上给定一点,如图所示,放置边长为2的正方形ABCD(实线所示,正方形的顶点A与点P重合,点B在圆周上).现将正方形ABCD沿圆周按顺时针方向连续滚动,当点A首次回到点P的位置时,点A所走过的路径的长度为( )| A、4π | ||||
B、(3+
| ||||
C、(1+2
| ||||
D、(2+
|
已知O(0,0),A(2,1),O,A,B,C依逆时针方向构成正方形的四个顶点.
(1)求B,C两点的坐标;
(2)把正方形OABC绕点A按顺时针方向旋转45°得到正方形AB′C′O′,求B′,C′,O′三点的坐标.
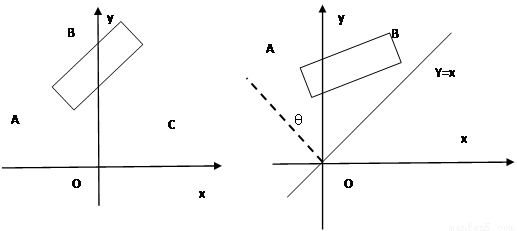
如图1,在平面直角坐标系中,边长为1的正方形OABC的顶点B在 轴的正半轴上,O为坐标原点.现将正方形OABC绕O点按顺时针方向旋转.
轴的正半轴上,O为坐标原点.现将正方形OABC绕O点按顺时针方向旋转.
(1)当点A第一次落到轴正半轴上时,求边BC在旋转过程中所扫过的面积;
(2)若线段AB与轴的交点为M(如图2),线段BC与直线 的交点为N.设
的交点为N.设 的周长为
的周长为 ,在正方形OABC旋转的过程中值是否有改变?并说明你的结论;
,在正方形OABC旋转的过程中值是否有改变?并说明你的结论;
(3)设旋转角为 ,当为何值时,
,当为何值时, 的面积最小?求出这个最小值, 并求出此时△BMN的内切圆半径.
的面积最小?求出这个最小值, 并求出此时△BMN的内切圆半径.

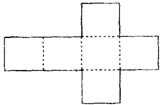 将1,2,3,4,5,6分别填入图中小正方形后,按虚线折成正方体,则所得正方体相对面上两个数的和都相等的概率是( )
将1,2,3,4,5,6分别填入图中小正方形后,按虚线折成正方体,则所得正方体相对面上两个数的和都相等的概率是( )A、
| ||
B、
| ||
C、
| ||
D、
|
 (2000•上海)根据指令(r,θ)(r≥0,-180°<θ≤180°),机器人在平面上能完成下列动作:先原地旋转角度θ(θ为正时,按逆时针方向旋转θ,θ为负时,按顺时针方向旋转-θ),再朝其面对的方向沿直线行走距离r.
(2000•上海)根据指令(r,θ)(r≥0,-180°<θ≤180°),机器人在平面上能完成下列动作:先原地旋转角度θ(θ为正时,按逆时针方向旋转θ,θ为负时,按顺时针方向旋转-θ),再朝其面对的方向沿直线行走距离r.湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com