题目列表(包括答案和解析)
如图,质量为
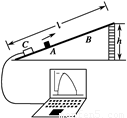
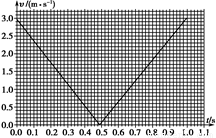
M的滑块A放在气垫导轨B上,C为位移传感器,它能将滑块A到传感器C的距离数据实时传送到计算机上,经计算机处理后在屏幕上显示滑块A的位移-时间( s-t)图象和速率-时间(v-t)图象.整个装置置于高度可调节的斜面上,斜面的长度为l、高度为h.(取重力加速度g=9.8 m/s2,结果可保留一位有效数字)(1)现给滑块A一沿气垫导轨向上的初速度,A的v-t图线如图所示.从图线可得滑块A下滑时的加速度a=________m/s2,摩擦力对滑块A运动的影响________.(填“明显,不可忽略”或“不明显,可忽略”)
(2)此装置还可用来验证牛顿第二定律.实验时通过改变________,可验证质量一定时,加速度与力成正比的关系;实验时通过改变________,可验证力一定时,加速度与质量成反比的关系.
(3)将气垫导轨换成滑板,滑块A换成滑块![]() ,给滑块
,给滑块![]() 一沿滑板向上的初速度,
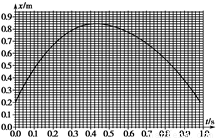
一沿滑板向上的初速度,![]() 的s-t图线如图.图线不对称是由于________造成的,通过图线可求得滑板的倾角
的s-t图线如图.图线不对称是由于________造成的,通过图线可求得滑板的倾角![]() =________(用反三角函数表示),滑块与滑板间的动摩擦因数μ=________.
=________(用反三角函数表示),滑块与滑板间的动摩擦因数μ=________.
| |||||||||||||||
如图(a),质量为M的滑块A放在气垫导轨B上,C为位移传感器,它能将滑块A到传感器C的距离数据实时传送到计算机上,经计算机处理后在屏幕上显示滑块A的位移-时间(s-t)图象和速率-时间(v-t)图象.整个装置置于高度可调节的斜面上,斜面的长度为了l、高度为h.(取重力加速度g=9.8 m/s2,结果可保留一位有效数字)
(1)现给滑块A一沿气垫导轨向上的初速度,A的v-t图线如图(b)所示.从图线可得滑块A下滑时的加速度a=________m/s2,摩擦力对滑块A运动的影响________.(填“明显,不可忽略”或“不明显,可忽略”)
(2)此装置还可用来验证牛顿第二定律.实验时通过改变________,可验证质量一定时,加速度与力成正比的关系;实验时通过改变________,可验证力一定时,加速度与质量成反比的关系.
(3)将气垫导轨换成滑板,滑块A换成滑块![]() ,给滑块
,给滑块![]() 一沿滑板向上的初速度,
一沿滑板向上的初速度,![]() 的s-t图线如图(c).图线不对称是由于________造成的,通过图线可求得滑板的倾角
的s-t图线如图(c).图线不对称是由于________造成的,通过图线可求得滑板的倾角![]() =________(用反三角函数表示),滑块与滑板间的动摩擦因数μ=________
=________(用反三角函数表示),滑块与滑板间的动摩擦因数μ=________
(12分)如图所示,质量为M的滑块A放在气垫导轨B上,C为位移传感器,它能将滑块A到传感器C的距离数据实时传送到计算机上,经计算机处理后在屏幕上显示滑块A的位移—时间(x-t)图象和速率—时间(v-t)图象.整个装置置于高度可调节的斜面上,斜面的长度为l、高度为h.(取重力加速度g="9.8" m/s2,结果保留一位有效数字).
(1)现给滑块A一沿气垫导轨向上的初速度,A的v-t图线如下图实所示.从图线可得滑块A下滑时的加速度a = m/s2,摩擦力对滑块A运动的影响 .(填“明显,不可忽略”或“不明显,可忽略”)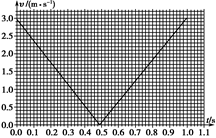
(2)此装置还可用来验证牛顿第二定律.实验时通过改变 可验证质量一定时,加速度与力成正比的关系;通过改变 可验证力一定时,加速度与质量成反比的关系.
(3)将气垫导轨换成滑板,滑块A换成滑块A′,给滑块A′一沿滑板向上的初速度,A′的x-t图线如下图实所示.图线不对称是由于 造成的,通过图线可求得滑块与滑板间的动摩擦因数 = .
= .
(12分)如图所示,质量为M的滑块A放在气垫导轨B上,C为位移传感器,它能将滑块A到传感器C的距离数据实时传送到计算机上,经计算机处理后在屏幕上显示滑块A的位移—时间(x-t)图象和速率—时间(v-t)图象.整个装置置于高度可调节的斜面上,斜面的长度为l、高度为h.(取重力加速度g="9.8" m/s2,结果保留一位有效数字).
(1)现给滑块A一沿气垫导轨向上的初速度,A的v-t图线如下图实所示.从图线可得滑块A下滑时的加速度a = m/s2,摩擦力对滑块A运动的影响 .(填“明显,不可忽略”或“不明显,可忽略”)
(2)此装置还可用来验证牛顿第二定律.实验时通过改变 可验证质量一定时,加速度与力成正比的关系;通过改变 可验证力一定时,加速度与质量成反比的关系.
(3)将气垫导轨换成滑板,滑块A换成滑块A′,给滑块A′一沿滑板向上的初速度,A′的x-t图线如下图实所示.图线不对称是由于 造成的,通过图线可求得滑块与滑板间的动摩擦因数 = .
= .
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com

