数学英语物理化学 生物地理
数学英语已回答习题未回答习题题目汇总试卷汇总练习册解析答案
题目列表(包括答案和解析)
查看答案和解析>>
国际学校优选 - 练习册列表 - 试题列表
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区

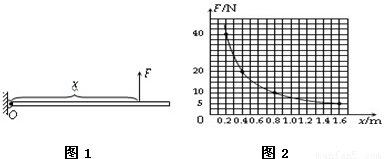


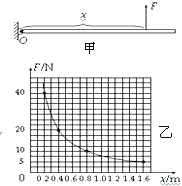 如图甲所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一个“拉力──距离传感器”竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图乙中图象所示.可知该金属杆重
如图甲所示,长1.6m、粗细均匀的金属杆可以绕O点在竖直平面内自由转动,一个“拉力──距离传感器”竖直作用在杆上,并能使杆始终保持水平平衡.该传感器显示其拉力F与作用点到O点距离x的变化关系如图乙中图象所示.可知该金属杆重