ЬтФПСаБэ(АќРЈД№АИКЭНтЮі)

| ЪЕбщДЮЪ§ | 1 | 2 | 3 | 4 |
| AДІЙГТыИіЪ§ | 1 | 3 | 5 | 8 8 |
| BДІЙГТыИіЪ§ | 2 | 6 | 10 10 |
16 |
ЃЈЙВ5ЗжЃЉШчЯТЭММзЫљЪОЃЌаЁУїдкЬНОПЁАИмИЫЕФЦНКтЬѕМўЁБЪЕбщжаЫљгУЕФЪЕбщЦїВФгаЃКИмИЫЁЂжЇМмЁЂЕЏЛЩВтСІМЦЁЂПЬЖШГпЁЂЯИЯпКЭжЪСПЯрЭЌЕФЙГТыШєИЩИіЁЃ
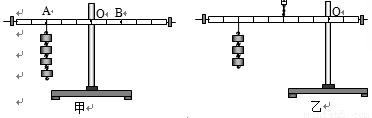
ЃЈ1ЃЉЪЕбщЧАЃЌНЋИмИЫжаЕужУгкжЇМмЩЯЃЌЕБИмИЫОВжЙЪБЃЌЗЂЯжИмИЫгвЖЫЯТГСЃЎДЫЪБЃЌгІАбИмИЫзѓЖЫЕФЦНКтТнФИЯђ ЃЈЬюЁАзѓЁБЛђЁАгвЁБЃЉЕїНкЃЌЪЙИмИЫдкВЛЙвЙГТыЪБЃЌДяЕНЫЎЦНЦНКтзДЬЌЁЃ
ЃЈ2ЃЉИмИЫЕїНкЦНКтКѓЃЌаЁУїдкИмИЫЩЯAЕуДІЙв4ИіЙГТыЃЌдкBЕуДІЙв6ИіЙГТыИмИЫЧЁ
КУдкдЮЛжУЦНКтЁЃгкЪЧаЁУїБуИљОнетДЮЪЕбщЕУГіСЫИмИЫЕФЦНКтЬѕМўЮЊF1l1= F2l2ЁЃЫћетбљ
ЕУГіЕФНсТлЪЧЗёКЯРэЃП ЃЛРэгЩЪЧЃК ЁЃ
ЃЈ3ЃЉЪЕбщНсЪјКѓЃЌаЁУїЬсГіСЫаТЕФЬНОПЮЪЬтЃКЁАШєжЇЕуВЛдкИмИЫЕФжаЕуЪБЃЌИмИЫЕФЦНКтЬѕМўЪЧЗёШдШЛГЩСЂЃПЁБгкЪЧаЁзщЭЌбЇРћгУШчЭМввЫљЪОзАжУНјааЬНОПЃЌЗЂЯждкИмИЫзѓЖЫЕФВЛЭЌЮЛжУЃЌгУЕЏЛЩВтСІМЦЪњжБЯђЩЯРЪЙИмИЫДІгкЫЎЦНЦНКтЪБЃЌВтГіЕФРСІДѓаЁЖМгыИмИЫЦНКтЬѕМўВЛЯрЗћЃЎЦфдвђПЩФмЪЧЃК
ЁЃ
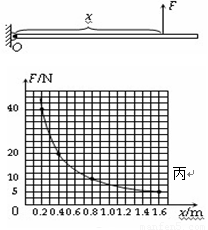
ЃЈ4ЃЉШчЭМБћЫљЪОЃЌГЄ1.6mЁЂДжЯИОљдШЕФН№ЪєИЫПЩвдШЦOЕудкЪњжБЦНУцФкздгЩзЊЖЏЃЌвЛИіЁАРСІЉЄЉЄОрРыДЋИаЦїЁБЪњжБзїгУдкИЫЩЯЃЌВЂФмЪЙИЫЪМжеБЃГжЫЎЦНЦНКтЁЃИУДЋИаЦїЯдЪОЦфРСІFгызїгУЕуЕНOЕуОрРыxЕФБфЛЏЙиЯЕШчЭМБћжаЭМЯёЫљЪОЁЃПЩжЊИУН№ЪєИЫжи NЁЃ
ЃЈЙВ5ЗжЃЉШчЯТЭММзЫљЪОЃЌаЁУїдкЬНОПЁАИмИЫЕФЦНКтЬѕМўЁБЪЕбщжаЫљгУЕФЪЕбщЦїВФгаЃКИмИЫЁЂжЇМмЁЂЕЏЛЩВтСІМЦЁЂПЬЖШГпЁЂЯИЯпКЭжЪСПЯрЭЌЕФЙГТыШєИЩИіЁЃ

ЃЈ1ЃЉЪЕбщЧАЃЌНЋИмИЫжаЕужУгкжЇМмЩЯЃЌЕБИмИЫОВжЙЪБЃЌЗЂЯжИмИЫгвЖЫЯТГСЃЎДЫЪБЃЌгІАбИмИЫзѓЖЫЕФЦНКтТнФИЯђ ЃЈЬюЁАзѓЁБЛђЁАгвЁБЃЉЕїНкЃЌЪЙИмИЫдкВЛЙвЙГТыЪБЃЌДяЕНЫЎЦНЦНКтзДЬЌЁЃ
ЃЈ2ЃЉИмИЫЕїНкЦНКтКѓЃЌаЁУїдкИмИЫЩЯAЕуДІЙв4ИіЙГТыЃЌдкBЕуДІЙв6ИіЙГТыИмИЫЧЁ
КУдкдЮЛжУЦНКтЁЃгкЪЧаЁУїБуИљОнетДЮЪЕбщЕУГіСЫИмИЫЕФЦНКтЬѕМўЮЊF1l1= F2l2ЁЃЫћетбљ
ЕУГіЕФНсТлЪЧЗёКЯРэЃП ЃЛРэгЩЪЧЃК ЁЃ
ЃЈ3ЃЉЪЕбщНсЪјКѓЃЌаЁУїЬсГіСЫаТЕФЬНОПЮЪЬтЃКЁАШєжЇЕуВЛдкИмИЫЕФжаЕуЪБЃЌИмИЫЕФЦНКтЬѕМўЪЧЗёШдШЛГЩСЂЃПЁБгкЪЧаЁзщЭЌбЇРћгУШчЭМввЫљЪОзАжУНјааЬНОПЃЌЗЂЯждкИмИЫзѓЖЫЕФВЛЭЌЮЛжУЃЌгУЕЏЛЩВтСІМЦЪњжБЯђЩЯРЪЙИмИЫДІгкЫЎЦНЦНКтЪБЃЌВтГіЕФРСІДѓаЁЖМгыИмИЫЦНКтЬѕМўВЛЯрЗћЃЎЦфдвђПЩФмЪЧЃК
ЁЃ
ЃЈ4ЃЉШчЭМБћЫљЪОЃЌГЄ1.6mЁЂДжЯИОљдШЕФН№ЪєИЫПЩвдШЦOЕудкЪњжБЦНУцФкздгЩзЊЖЏЃЌвЛИіЁАРСІЉЄЉЄОрРыДЋИаЦїЁБЪњжБзїгУдкИЫЩЯЃЌВЂФмЪЙИЫЪМжеБЃГжЫЎЦНЦНКтЁЃИУДЋИаЦїЯдЪОЦфРСІFгызїгУЕуЕНOЕуОрРыxЕФБфЛЏЙиЯЕШчЭМБћжаЭМЯёЫљЪОЁЃПЩжЊИУН№ЪєИЫжи NЁЃ


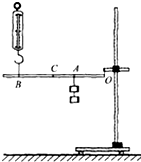 ФГЪЕбщаЁзщРћгУЭМЫљЪОзАжУбаОПИмИЫЕФЛњаЕаЇТЪЃЌЪЕбщЕФжївЊВНжшШчЯТЃК
ФГЪЕбщаЁзщРћгУЭМЫљЪОзАжУбаОПИмИЫЕФЛњаЕаЇТЪЃЌЪЕбщЕФжївЊВНжшШчЯТЃК| Gh1 |
| Fh2 |
| Gh1 |
| Fh2 |
ЙњМЪбЇаЃгХбЁ - СЗЯАВсСаБэ - ЪдЬтСаБэ
КўББЪЁЛЅСЊЭјЮЅЗЈКЭВЛСМаХЯЂОйБЈЦНЬЈ | ЭјЩЯгаКІаХЯЂОйБЈзЈЧј | ЕчаХеЉЦОйБЈзЈЧј | ЩцРњЪЗащЮожївхгаКІаХЯЂОйБЈзЈЧј | ЩцЦѓЧжШЈОйБЈзЈЧј
ЮЅЗЈКЭВЛСМаХЯЂОйБЈЕчЛАЃК027-86699610 ОйБЈгЪЯфЃК58377363@163.com