题目列表(包括答案和解析)
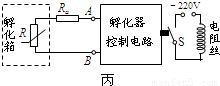
| t/℃ | 15.0 | 20.0 | 25.0 | 30.0 | 35.0 | 40.0 | 45.0 | 50.0 |
| R/Ω | 330 | 275 | 230 | 202 | 170 | 144 | 120 | 103 |
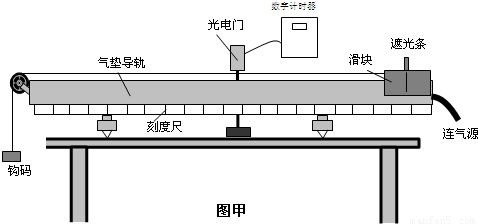
| 1 |
| 2 |
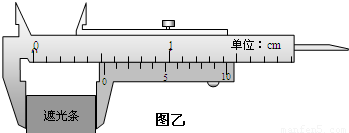
| d |
| △t |
| 1 |
| 2 |
| d |
| △t |
| t/℃ | 15.0 | 20.0 | 25.0 | 30.0 | 35.0 | 40.0 | 45.0 | 50.0 |
| R/Ω | 330 | 275 | 230 | 202 | 170 | 144 | 120 | 103 |

| 组别 | 1 | 2 | 3 | 4 | 5 | 6 |
| m/kg | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 |
| a/m?s-2 | 0.95 | 0.72 | 0.61 | 0.49 | 0.40 | 0.35 |
2011年11月29日我国在西昌卫星发射中心用“长征三号甲”运载火箭,成功将第9颗北斗导航卫星送入太空轨道.“北斗”卫星导航定位系统将由5颗静止轨道卫星(同步卫星)和30颗非静止轨道卫星组成(如下图所示),30颗非静止轨道卫星中有27颗是中轨道卫星,中轨道卫星平均分布在倾角55度的三个平面上,轨道高度约21500公里,静止轨道卫星的高度约为36000公里,地球半径约为6400公里.已知 ,下列关于北斗导航卫星的说法正确的是
,下列关于北斗导航卫星的说法正确的是
A.静止轨道卫星的向心加速度比中轨道卫星向心加速度大
B.静止轨道卫星和中轨卫星的线速度均大于地球的第一宇宙速度
C.中轨道卫星的周期约为12.7h
D.地球赤道上随地球自转物体的向心加速度比静止轨道卫星向心加速度小
2011年11月29日我国在西昌卫星发射中心用“长征三号甲”运载火箭,成功将第9颗北斗导航卫星送入太空轨道.“北斗”卫星导航定位系统将由5颗静止轨道卫星(同步卫星)和30颗非静止轨道卫星组成(如下图所示),30颗非静止轨道卫星中有27颗是中轨道卫星,中轨道卫星平均分布在倾角55度的三个平面上,轨道高度约21500公里,静止轨道卫星的高度约为36000公里,地球半径约为6400公里.已知![]() ,下列关于北斗导航卫星的说法正确的是
,下列关于北斗导航卫星的说法正确的是
A.静止轨道卫星的向心加速度比中轨道卫星向心加速度大
B.静止轨道卫星和中轨卫星的线速度均大于地球的第一宇宙速度
C.中轨道卫星的周期约为12.7h
D.地球赤道上随地球自转物体的向心加速度比静止轨道卫星向心加速度小
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com