题目列表(包括答案和解析)
| h |
| d |
| h |
| d |
| 1 |
| 2 |
| b2 |
| t2 |
| 1 |
| 2 |
| b2 |
| t2 |
| 1 |
| t2 |
| 1 |
| t2 |
| 2(hM-dm)g |
| (M+m)db2 |
| 2(hM-dm)g |
| (M+m)db2 |
| 1 | 2 | 3 | 4 | 5 | |||
| s(m) | 0.600 | 0.800 | 1.000 | 1.200 | 1.400 | ||
| t(ms) | 8.22 | 7.17 | 6.44 | 5.85 | 5.43 | ||
|
1.48 | 1.95 | 2.41 | 2.92 | 3.39 |
| 1 |
| t2 |
| 1 |
| t2 |
| 实验次数 | 小车 | 拉力F/N | 位移s/cm |
| 1 | Ⅰ | 0.1 | |
| Ⅱ | 0.2 | 46.51 | |
| 2 | Ⅰ | 0.2 | 29.04 |
| Ⅱ | 0.3 | 43.63 | |
| 3 | Ⅰ | 0.3 | 41.16 |
| Ⅱ | 0.4 | 44.80 | |
| 4 | Ⅰ | 0.4 | 36.43 |
| Ⅱ | 0.5 | 45.56 |
| 1 |
| t2 |
| 1 |
| t2 |
| 1 | 2 | 3 | 4 | 5 | |||
| s/m | 0.600 | 0.800 | 1.000 | 1.200 | 1.400 | ||
| t/ms | 8.22 | 7.17 | 6.44 | 5.85 | 5.43 | ||
|
1.48 | 1.95 | 2.41 | 2.92 | 3.39 |
| 1 |
| t2 |
| 1 |
| t2 |
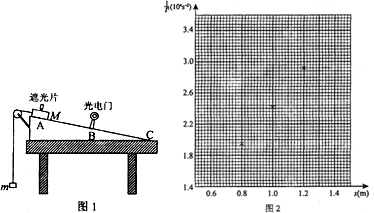
(10分)现要通过实验验证机械能守恒定律。实验装置如图1所示:水平桌面上固定一倾斜的气垫导轨;导轨上A点处有一带长方形遮光片的滑块,其总质量为M,左端由跨过轻质光滑定滑轮的细绳与一质量为m的砝码相连;遮光片两条长边与导轨垂直;导轨上B点有一光电门,可以测试遮光片经过光电门时的挡光时间t,用d表示A点到导轨底端C点的距离,h表示A与C的高度差,b表示遮光片的宽度,s表示A、B两点的距离,将遮光片通过光电门的平均速度看作滑块通过B点时的瞬时速度。用g表示重力加速度。完成下列填空和作图;
(1)若将滑块自A点由静止释放,则在滑块从A运动至B的过程中,滑块、遮光片与砝码组成的系统重力势能的减小量可表示为_____。动能的增加量可表示为_________。若在运动过程中机械能守恒,与s的关系式为
= ________。
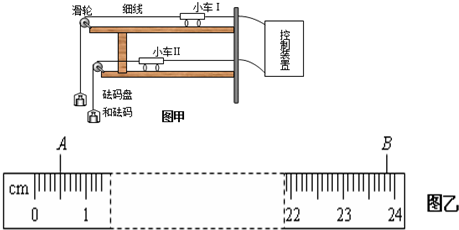
(2)多次改变光电门的位置,每次均令滑块自同一点(A点)下滑,测量相应的s与t值,结果如下表所示:
|
| 1 | 2 | 3 | 4 | 5 |
| S(m) | 0.600 | 0.800 | 1.000 | 1.200 | 1.400 |
| t(ms) | 8.22 | 7.17 | 6.44 | 5.85 | 5.43 |
| 1/t2(104s-2) | 1.48 | 1.95 | 2.41 | 2.92 | 3.39 |
以s为横坐标,![]() 为纵坐标,请你在图2位置的坐标纸中描出第1和第5个数据点;根据5个数据点作直线,求得该直线的斜率k=__________
为纵坐标,请你在图2位置的坐标纸中描出第1和第5个数据点;根据5个数据点作直线,求得该直线的斜率k=__________![]() (保留3位有效数字)。
(保留3位有效数字)。
由测得的h、d、b、M和m数值可以计算出![]() 直线的斜率
直线的斜率![]() ,将k和
,将k和![]() 进行比较,若其差值在实验误差允许的范围内,则可认为此实验验证了机械能守恒定律。
进行比较,若其差值在实验误差允许的范围内,则可认为此实验验证了机械能守恒定律。
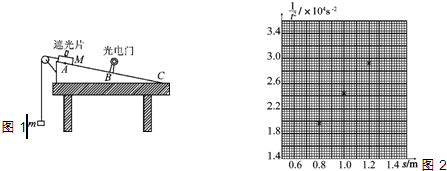
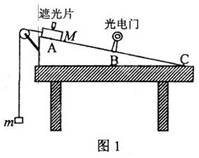
(10分)现要通过实验验证机械能守恒定律。实验装置如图1所示:水平桌面上固定一倾斜的气垫导轨;导轨上A点处有一带长方形遮光片的滑块,其总质量为M,左端由跨过轻质光滑定滑轮的细绳与一质量为m的砝码相连;遮光片两条长边与导轨垂直;导轨上B点有一光电门,可以测试遮光片经过光电门时的挡光时间t,用d表示A点到导轨底端C点的距离,h表示A与C的高度差,b表示遮光片的宽度,s表示A、B两点的距离,将遮光片通过光电门的平均速度看作滑块通过B点时的瞬时速度。用g表示重力加速度。完成下列填空和作图;

(1)若将滑块自A点由静止释放,则在滑块从A运动至B的过程中,滑块、遮光片与砝码组成的系统重力势能的减小量可表示为_____。动能的增加量可表示为_________。若在运动过程中机械能守恒, 与s的关系式为= ________。
与s的关系式为= ________。
(2)多次改变光电门的位置,每次均令滑块自同一点(A点)下滑,测量相应的s与t值,结果如下表所示:
|
|
1 |
2 |
3 |
4 |
5 |
|
S(m) |
0.600 |
0.800 |
1.000 |
1.200 |
1.400 |
|
t(ms) |
8.22 |
7.17 |
6.44 |
5.85 |
5.43 |
|
1/t2(104s-2) |
1.48 |
1.95 |
2.41 |
2.92 |
3.39 |
以s为横坐标, 为纵坐标,请你在图2位置的坐标纸中描出第1和第5个数据点;根据5个数据点作直线,求得该直线的斜率k=__________
为纵坐标,请你在图2位置的坐标纸中描出第1和第5个数据点;根据5个数据点作直线,求得该直线的斜率k=__________ (保留3位有效数字)。
(保留3位有效数字)。
由测得的h、d、b、M和m数值可以计算出 直线的斜率
直线的斜率 ,将k和进行比较,若其差值在实验误差允许的范围内,则可认为此实验验证了机械能守恒定律。
,将k和进行比较,若其差值在实验误差允许的范围内,则可认为此实验验证了机械能守恒定律。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com