科目: 来源: 题型:多选题
 如图甲所示,皮带运输机靠货物与传送皮带之间的摩擦力把货物送往高处.若运输机的皮带与水平地面的夹角为30°将质量为m的一包货物静止放到运输机底端,货物在传送皮带上运动的V-t图象如图乙所示,则( )
如图甲所示,皮带运输机靠货物与传送皮带之间的摩擦力把货物送往高处.若运输机的皮带与水平地面的夹角为30°将质量为m的一包货物静止放到运输机底端,货物在传送皮带上运动的V-t图象如图乙所示,则( )| A. | 在O〜t0时间内,摩擦力对货物做的功为$\frac{mg{v}_{0}{t}_{0}}{4}$ | |
| B. | 在t0〜2t0时间内,摩擦力对货物做的功为$\frac{mg{v}_{0}{t}_{0}}{2}$ | |
| C. | 在O〜2t0时间内,重力的平均功率为$\frac{3mg{v}_{0}}{4}$ | |
| D. | 在O〜2t0时间内,重力的平均功率为$\frac{3mg{v}_{0}}{8}$ |
查看答案和解析>>
科目: 来源: 题型:选择题
 如图所示,两条水平放置的长直金属导轨间距为l,左端与阻值为R的定值电阻相连,金属直杆ab和cd的电阻阻值各为R,两端刚好能与导轨接触.ab、cd两杆用绝缘细线连接,间距为l,ab杆右侧l处有一宽度为l的匀强磁场区域,磁感应强度大小为B,方向垂直于导轨所在平面向里.若金属导轨电阻忽略不计,两金属杆和导轨始终接触良好,当两杆始终以恒定速度V向右运动时,用Icd表示金属棒Cd流过的电流(c→d为电流的正方向)、用Ucd表示金属棒cd两端的电势差,正确描述IcdUcd随位移变化的图象是( )
如图所示,两条水平放置的长直金属导轨间距为l,左端与阻值为R的定值电阻相连,金属直杆ab和cd的电阻阻值各为R,两端刚好能与导轨接触.ab、cd两杆用绝缘细线连接,间距为l,ab杆右侧l处有一宽度为l的匀强磁场区域,磁感应强度大小为B,方向垂直于导轨所在平面向里.若金属导轨电阻忽略不计,两金属杆和导轨始终接触良好,当两杆始终以恒定速度V向右运动时,用Icd表示金属棒Cd流过的电流(c→d为电流的正方向)、用Ucd表示金属棒cd两端的电势差,正确描述IcdUcd随位移变化的图象是( )| A. | 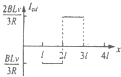 | B. | 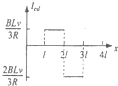 | C. | 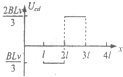 | D. | 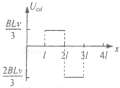 |
查看答案和解析>>
科目: 来源: 题型:选择题
 在水平地面上小物块经过如图所示的位置时,速度大小为v1、方向水平向右,若立即对小物块施加水平向左的恒力F,经过一段时间后小物块再次回到图示位置,速度大小为v2、方向水平向左,且v2<v1.已知F=kmg,则小物块与水平地面之间的动摩擦因数为( )
在水平地面上小物块经过如图所示的位置时,速度大小为v1、方向水平向右,若立即对小物块施加水平向左的恒力F,经过一段时间后小物块再次回到图示位置,速度大小为v2、方向水平向左,且v2<v1.已知F=kmg,则小物块与水平地面之间的动摩擦因数为( )| A. | $\frac{{v}_{1}^{2}+{v}_{2}^{2}}{k({v}_{1}^{2}-{v}_{2}^{2})}$ | B. | $\frac{k({v}_{1}^{2}+{v}_{2}^{2})}{{v}_{1}^{2}-{v}_{2}^{2}}$ | ||
| C. | $\frac{{v}_{1}^{2}-{v}_{2}^{2}}{k({v}_{1}^{2}+{v}_{2}^{2})}$ | D. | $\frac{k({v}_{1}^{2}-{v}_{2}^{2})}{{v}_{1}^{2}+{v}_{2}^{2}}$ |
查看答案和解析>>
科目: 来源: 题型:选择题
| A. | 卫星运行的角速度?与$\sqrt{r}$成反比 | B. | 卫星运行的线速度V与$\sqrt{r}$成正比 | ||
| C. | 卫星的向心加速度a与r2成反比 | D. | 卫星运行的周期T与$\root{3}{{r}^{2}}$成正比 |
查看答案和解析>>
科目: 来源: 题型:选择题
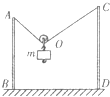 在水平地面上,两个直杆AB、CD竖直固定,AB杆略短,一条不可伸长的细线两端分别系于两杆顶点A、C,绳上有一个可以自由滑动的滑轮,当悬挂质量为m的钩码时滑轮静止在O点,如图所示.当悬挂质量为2m的钩码时滑轮静止在O′点(图中未标出),此时∠O′AB=α,∠O′CD=β不计滑轮与细线间的摩擦力,下列说法正确的是( )
在水平地面上,两个直杆AB、CD竖直固定,AB杆略短,一条不可伸长的细线两端分别系于两杆顶点A、C,绳上有一个可以自由滑动的滑轮,当悬挂质量为m的钩码时滑轮静止在O点,如图所示.当悬挂质量为2m的钩码时滑轮静止在O′点(图中未标出),此时∠O′AB=α,∠O′CD=β不计滑轮与细线间的摩擦力,下列说法正确的是( )| A. | O′点比O点更靠近直杆AB,α=β | B. | O′点比O点更靠近直杆AB,α≠β | ||
| C. | O′点与O点在同一位置,α=β | D. | O′点与O点在同一位置,α≠β |
查看答案和解析>>
科目: 来源: 题型:多选题
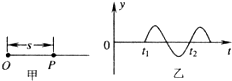 如图甲所示,O点为振源,OP=s,t=0时刻O点由平衡位置开始振动,产生向右沿直线传播的简谐横波.图乙为从t=0时刻开始描绘的质点P的振动图象.下列判断中正确的是( )
如图甲所示,O点为振源,OP=s,t=0时刻O点由平衡位置开始振动,产生向右沿直线传播的简谐横波.图乙为从t=0时刻开始描绘的质点P的振动图象.下列判断中正确的是( )| A. | 该波的传播周期为(t2-t1) | |
| B. | 0-t2时间内,这列波的传播的距离为$\frac{{s{t_2}}}{t_1}$ | |
| C. | t=0时刻,振源O振动的方向沿y轴负方向 | |
| D. | t=t2时刻,P点的振动方向滑y轴负方向 |
查看答案和解析>>
科目: 来源: 题型:解答题
 如图所示,一圆筒形汽缸静止于地面上,汽缸的质量为M,容积为V活塞(连同手柄)的质量不计,汽缸内部的横截面积为S,大气压强为P0,平衡时汽缸内气体体积为$\frac{V}{2}$.现用手握住活塞手柄缓慢向上提,直至缸口,在整个上提过程中气体的温度保持不变,不计活塞与汽缸壁间的摩擦,求此时地面对汽缸的支持力.
如图所示,一圆筒形汽缸静止于地面上,汽缸的质量为M,容积为V活塞(连同手柄)的质量不计,汽缸内部的横截面积为S,大气压强为P0,平衡时汽缸内气体体积为$\frac{V}{2}$.现用手握住活塞手柄缓慢向上提,直至缸口,在整个上提过程中气体的温度保持不变,不计活塞与汽缸壁间的摩擦,求此时地面对汽缸的支持力.查看答案和解析>>
科目: 来源: 题型:多选题
| A. | 气体对器壁的压强就是大量气体分子作用在器壁单位面积上的平均作用力 | |
| B. | 气体对器壁的压强就是大量气体分子单位时间内作用在器壁上的平均作用力 | |
| C. | 气体分子热运动的平均动能减小,气体的压强一定减小 | |
| D. | 单位体积的气体分子数增加,气体的压强可能减小 |
查看答案和解析>>
科目: 来源: 题型:解答题
 探究一个未知导体元件Rx(阻值约为100Ω)的阻值实验室提供如下器材:
探究一个未知导体元件Rx(阻值约为100Ω)的阻值实验室提供如下器材:查看答案和解析>>
科目: 来源: 题型:解答题

| 试验次数 | 释放高度h(m) | 时间t/(s) | v2 |
| 1 | 0.05 | 1.03 | 0.94 |
| 2 | 0.05 | 1.02 | 0.96 |
| 3 | 0.05 | 1.02 | 0.96 |
| 4 | 0.01 | 2.20 | 0.20 |
| 5 | 0.02 | 1.70 | |
| 6 | 0.03 | 1.30 | 0.59 |
| 7 | 0.04 | 1.14 | 0.77 |
| 8 | … |
查看答案和解析>>
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com