题目列表(包括答案和解析)
47.为了测定实验中得到的某种氨基酸的化学式,取l.78g该氨基酸,用l0mL
2 mol/L的NaOH溶液正好中和,已知氨基酸和氢氧化钠反应的化学方程式如下:

则这种氨基酸的式量为 ,其化学式为 。
(相对原于质量:H-l C-12 N-14 0-16)
46. 1953年美国科学家米勒用右图模拟地球原始大气 (成分有氢气、甲烷、氨
气等)进行实验。他先抽尽装置内空气,再通入氢气、甲烷、氨气,连续放电一周
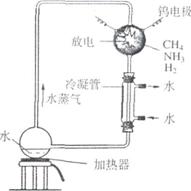 (模拟闪电)。最后鉴定系统中的反应产物,发现
(模拟闪电)。最后鉴定系统中的反应产物,发现
了多种氨基酸
(1)原始大气的氮元素主要以 态存在,
现代大气中的氮元素主要以 态存在。
(2)生命起源包含了以下几个过程.米勒实验证明了
其中的一个过程,该过程是 (填入数字代码)
①氨基酸合成蛋白质
②小分子合成了蛋白质的基本单位
⑧蛋白质形成多分子体系,产生了原始生命
45.某氨基酸可表示为: R-CH-COOH(R为烃基)
|
该氨基酸含有 种元素。 NH2
44.为了使智能型机器人的“智商”更接近于人,科学家没想让机器人拥有类似于人
脑的( )。
A血细胞 B肌肉细胞 C上皮细胞 D神经细胞
43.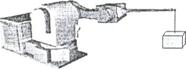 右图为机器人的起重装置,当它以20W的额定
右图为机器人的起重装置,当它以20W的额定
功率,向上匀速提起重为200N的物体时,物体的速
度为 m/s。
42.如右图所示,机器人的机械传动装置中,由电动机直接带动轮
子转动,电动机转速恒为2转,秒。若轮子半径为0.05m,则机器人
的速度v1为 m/s;若电动机直接带动半径为0.03m的轮子时,
机器人的速度v2为v1的 倍。
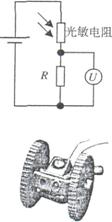
41.机器人通过光敏电阻制成的光传感器可以起到控制传动装
置.分辨黑白,识别道路的作用。右图为光传感器控制电路的示
意图,电源电压恒为9V,固定电阻R=800Ω。当白色路面上的
反射光照到光敏电阻时,光敏电阻阻值为l00Ω,此时固定电阻
R上的输出电压U为 V。
40.传感器是机器人的感觉器官,它能采集和检测外界多种信息,并把它转化成电信
号。传感器种类很多,常见的有:光传感器、磁场传感器和 传感器等。
39.机器人是仿造人类制造出来的一种新型机器。在接受、处理、应用信息等方面与
人有许多相似之处。在下表内.把能起类似作用的机器人模块和相应的人体组织器官
用实线连接起来。
|
机器人
人 |
 控制器
感觉器官 控制器
感觉器官执行器 肌肉 传感器 大脑 |
38.“硅谷”和“汽车城”都是理想的工业旅游目的地。“汽车城”形成初期的主要
区位优势是 、
。
硅谷成为世界电子中心的区位优势是 、
。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com