3.下列说法中正确的是:( )
A.机械效率高的机械做功一定快 B.做功越快的机械,功率一定越大
C.做功多的机械,机械效率一定高 D.功率大的机械做功一定多
2. 当两个小孩在跷跷板上处于水平平衡时,具备的条件是:( )
当两个小孩在跷跷板上处于水平平衡时,具备的条件是:( )
A.他们的体重一定相等
B.他们的坐处到转轴的距离一定相等
C.他们对板的压力与板的受力面积的比值一定相等
D.他们对板的压力及其对支点的力臂的乘积一定相等
一.选择题:
1.如图1所示的四种简单机械中,属于费力杠杆的是:( )
29.(9分)探究电流与电压、电阻的关系。
[提出问题]通过导体的电流与导体两端电压及导体电阻的大小有什么关系?
[猜 想]①导体的电阻一定时,通过导体的电流与其两端电压成正比。
②导体的电阻一定时,通过导体的电流与其两端电压的平方成正比。
③导体两端的电压一定时,通过导体的电流与导体的电阻成反比。
[实验器材]电源(电压恒为4.5 V),电流表、电压表各一只,开关一个,三个定值电阻(5 Ω、10 Ω、15 Ω),两只滑动变阻器(“20 Ω 2 A”、“50 Ω 1 A”),导线若干。
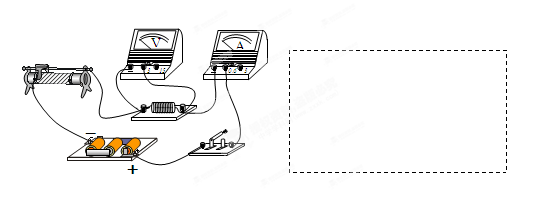
[实验过程](1)根据图所示实物图在虚线框内画出电路图。连接电路时开关必须 ,滑动变阻器的滑片应放在 位置。
(2)小明按图正确连接电路后,闭合开关,发现电流表有示数,电压表指针超过量程。小明操作中的错误是 。
(3)小明改正错误后继续实验,通过改变定值电阻R两端的电压,测得电流、电压的值如表一。分析数据可得出猜想 是正确的。
表一 表二
|
电压U/V |
1.2 |
1.6 |
2.0 |
2.4 |
2.8 |
|
电阻R/Ω |
5 |
10 |
15 |
|
电流I/A |
0.12 |
0.16 |
0.20 |
0.24 |
0.28 |
电流 I/A |
0.30 |
0.15 |
0.10 |
(4)小红在探究猜想③时,先将5 Ω的电阻连入电路中,闭合开关,移动滑片,使与电阻并联的电压表的示数为1.5 V,并记下电流值;再分别改接10 Ω、15 Ω的电阻,重复上述实验,得到了表二中的实验数据。分析数据得出,猜想③是正确的。为了完成此实验,滑动变阻器应选择______(“20Ω 2A”和“50Ω 1A”中选择一个),实验中,小红多次移动变阻器滑片的目的是 。
(5)小华在探究猜想③时,重新设计了电路,保持电压表的示数为3 V,得到了与表二 相同的数据,也完成了实验探究。小华与小红的实验相比不同之处是:
相同的数据,也完成了实验探究。小华与小红的实验相比不同之处是:
 ____________________________________________________________________。
____________________________________________________________________。
盐城市中兴实验学校2013-2014学年度第一学期学情检测
28.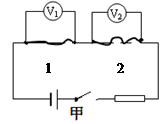 (
( 5分)某物理兴趣小组的同学为探究导体电阻与导体长度和横截面积之间的定量关系,设计了如图甲所示的电路.实验时他们将所选的两种金属丝接入电路1和2的位置,通过比较电压表的示数来比较电阻丝的大小.现有几根康铜合金丝和镍铬合金丝,其规格如下表所示:
5分)某物理兴趣小组的同学为探究导体电阻与导体长度和横截面积之间的定量关系,设计了如图甲所示的电路.实验时他们将所选的两种金属丝接入电路1和2的位置,通过比较电压表的示数来比较电阻丝的大小.现有几根康铜合金丝和镍铬合金丝,其规格如下表所示:
|
编号 |
材料 |
长度(m) |
横截面积(mm 2) 2) |
|
A |
镍铬合金 |
0.3 |
0.5 |
|
B |
镍铬合金 |
0.6 |
0.5 |
|
C |
镍铬合金 |
0.3 |
1.0 |
|
D |
康铜丝 |
0.3 |
0.5 |
|
E |
康铜丝 |
0.3 |
1.0 |
|
F |
康铜丝 |
0.8 |
0.8 |
(1)在探究导体电阻与导体长度之间的定量关系时,他们将编号为 两根金属丝对应接入电路1和2的位置,当发现电压表示数U1:U2接近 时,可以初步判定:在导体的材料和横截面积相同的条件下,导体的电阻与其长度成正比.
(2)在探究过程中,如果将编号为A和C两根金属丝接入电路1和2的位置,则他们想探究的是导体电阻与 之间的定量关系.
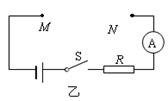
(3)在“交流与合作”时,有位同学提出:用如图乙所示的电路,将所选的金属丝分别接入电路M、N之间,读出电流,然后利用电流跟电阻之间的反比关系,也能探究导体电阻与导体长度和横截面积之间的定量关系.你认为他的实验方法合理吗?请说明理由.
、
27.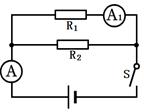 (6分)如图所示电路中,电阻R1的阻值为10W,闭合开关S,电流表Al的示数为0.6A,电流表A的示数为1A。
(6分)如图所示电路中,电阻R1的阻值为10W,闭合开关S,电流表Al的示数为0.6A,电流表A的示数为1A。
求:⑴通过电阻R2的电流;⑵电源电压;⑶电阻R2的阻值;
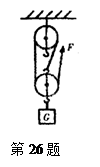
26.(8分)用如图所示的滑轮组匀速提升重为480N的物体,所用
拉力F为200N,将重物提升3m所用的时间为10s.求:
(1)有用功W 有为多少J.
(2)该滑轮组的机械效率 为多少。
为多少。
(3)拉力F做功的功率P为多少W.
(4)若所挂物重换为600N,则滑轮组的机械效率又为多少。
(不计绳重和摩擦)
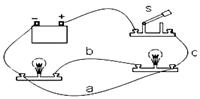
25.(4分)如图所示电路:
(1)闭合开关后电路将 短路(选填“通路”或“断路”或“短路”);
(2)去掉导线a后,电路是 串联电路;
(3)改变a、b、c三根导线中一根的接法,使电路成为并联电路(先在原导线上打“×”,后用笔画线代替导线画出符合要求的导线)
 .
.
24.(8分)在探究“杠杆平衡条件”的实验中,先把杠杆的中点支在支架上,杠杆静止在如图24甲所示位置,此时杠杆处于 (选填“平衡”或“不平衡”)状态.为了使杠杆在水平位置平衡,可以调节右端的平衡螺母,使它向 (选填“左”或“右”)移动.在杠杆上挂2N的重物,如图乙所示,杠杆静止时弹簧秤的示数为
N,将所挂的重物往左移1格,杠杆重新平衡后,弹簧秤的示数会 (选填“变大”、“变小”或“不变”).
23.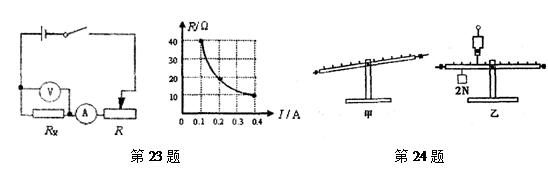 (4分)如图所示,在研究通过导体的电流跟电阻的关系时,要保持导体两端电压不变.实验中,不断改变R x的阻值,调节滑动变阻器使电压表示数保持不变,得到了I与R的关系图像,由图像可以得出的结论是 ;在实验中,电压表的示数始终保持 V不变.
(4分)如图所示,在研究通过导体的电流跟电阻的关系时,要保持导体两端电压不变.实验中,不断改变R x的阻值,调节滑动变阻器使电压表示数保持不变,得到了I与R的关系图像,由图像可以得出的结论是 ;在实验中,电压表的示数始终保持 V不变.

湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com