A.T1=T3>T2 B.T1=T3<T2
C.绳a的拉力增大 D.绳a的拉力减小
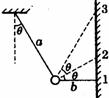
8.如图所示,用与竖直方向成 角(<45°)的轻绳a和水平轻绳b拉一个小球,这时绳b的拉力为T1;现保持小球位置不动,使绳b在竖直平面内逆时针转过角,绳b的拉力变为T2;再转过角,绳b的拉力变为T3。则 ( )
角(<45°)的轻绳a和水平轻绳b拉一个小球,这时绳b的拉力为T1;现保持小球位置不动,使绳b在竖直平面内逆时针转过角,绳b的拉力变为T2;再转过角,绳b的拉力变为T3。则 ( )
A.钩码的重力约为4N
B.钩码的重力约为3N
C.A、B、C、D四段图线中,钩码处于超重状态的A、D,失重状态的是B、C
D.A、B、C、D四段图线中,钩码处于超重状态的A、B,失重状态的是C、D
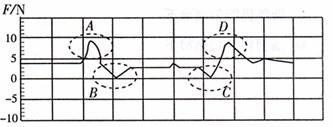
7.用力传感器悬挂一钩码沿竖直方向由静止开始运动。下图中实线是传感器记录的拉力大小变化情况,则 ( )
C. D.
D.
A. B.
B.
6.如图所示,一根轻质弹簧上端固定,下端挂一质量为m0的平盘,盘中的物体质量为m,当盘静止时,弹簧伸长了l,现向下拉盘使弹簧再伸长△l后停止,然后松手放开,设弹簧总处在弹性限度内,则刚松开手时盘对物体的支持力等于
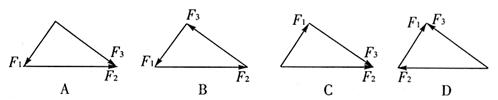
5.如图所示,F1、F2、F3恰好构成封闭的直角三角形,这三个力的合力最大的是
D.相邻两个1s内的位移之差都是
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com