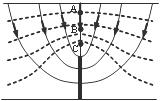
15.如图所示,某同学用插针法测定一半圆形玻璃砖的折射率。在平铺的白纸上垂直纸面插大头针P1、P2确定入射光线,并让入射光线过圆心O,在玻璃砖(图中实线部分)另一侧垂直纸面插大头针P3,使P3挡住P1、P2的像,连接O P3.图中MN为分界面,虚线半圆与玻璃砖对称,B、C分别是入射光线、折射光线与圆的交点,AB、CD均垂直于法线并分别交法线于A、D点。设AB的长度为l1,AO的长度为l2,CD的长度为l3,DO的长度为l4,为较方便地表示出玻璃砖的折射率,需用刻度尺测量 (用上述所给物理量的字母表示),则玻璃砖的折射率可表示为 。
14.模块机器人具有三个部分,它们分别是传感器、控制器和执行器。模块机器人的控制器内存有5种控制方法;可使用的传感器大致有5类,列表如下:
序号
控制方法
序号
传感器
01
即时控制
01
位移传感器
02
延迟控制
02
声传感器
03
“与”门控制
03
温度传感器
04
“或”门控制
04
光传感器
05
“非”门控制
05
磁传感器
执行器模块为小灯模块、电动机模块。
某同学要设计一个装置,当有光照射且有声音时,电动机才会转,则应选择的控制器序号为________ __,应使用的传感器序号为_________________。
13.在如图所示的四张图中,AB、BC均为轻质杆,各图中杆的A、C端都通过铰链与墙连接,两杆都在B处由铰链相连接.图中的AB杆可以用与之等长的轻绳代替的有__________;图中的BC杆可以用与之等长的轻绳代替的有__________。
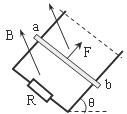
A.作用于金属捧上的各个力的合力所作的功等于零
B.作用于金属捧上的各个力的合力所作的功等于mgh与电阻R上发出的焦耳热之和
C.金属棒克服安培力做的功大于电阻R上发出的焦耳热
D.恒力F与重力的合力所作的功等于电阻R上发出的焦耳热
12.如图所示,两根光滑的金属导轨,平行放置在倾角为θ斜面上,导轨的左端接有电阻R,导轨自身的电阻可忽略不计。斜面处在一匀强磁场中,磁场方向垂直于斜面向上。质量为m,电阻可不计的金属棒ab,在沿着斜面与棒垂直的恒力作用下沿导轨匀速上滑,并上升h高度,如图所示。在这过程中 ( )
A. B. C. D.
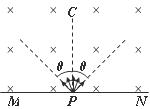
11.如图所示,在足够大的屏MN的上方有磁感应强度为B的匀强磁场,磁场方向垂直纸面向里,P为屏上一小孔,PC
|