2.关于力臂的教学:
提问:支点与力的作用点间距离的远近一定会给力的作用效果带来影响吗?
实验1 展示图3所示的示教板.
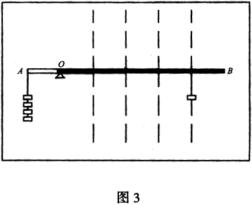
(边说边演示)示教板上有一杠杆AB,O点是杠杆的支点,O点右边每隔10厘米1条虚线将50厘米长的OB杆等分.现在取5个等质量的钩码,将其中4个挂在杠杆左端A处,作为杠杆的阻力 .剩下的1个作为杠杆的动力
.剩下的1个作为杠杆的动力 ,手拿该钩码在OB间寻找挂点,使杠杆平衡,刚好挂在第4个格上.
,手拿该钩码在OB间寻找挂点,使杠杆平衡,刚好挂在第4个格上.
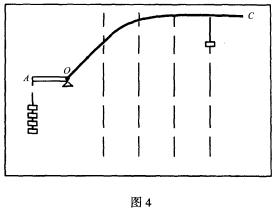
实验2 将OB卸下来,换上OC杆,虚线位置不变(如图4所示)保持左边的阻力 不变,仍用刚才的钩码寻找使杠杆平衡的挂点,发现钩码(动力 )仍在第4条虚线上,但此时力的作用点到O点间距离发生了变化.
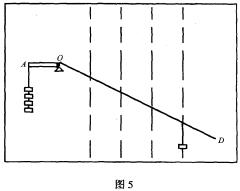
实验3 将OC卸下来,换上OD杆(如图5所示),步骤同上.发现钩码(动力 )仍在第4条虚线上,力的作用点到O点间的距离也发生了变化.
上面3个实验结论的共同点是什么?
在阻力保持不变的情况下,尽管动力作用点与支点间的长度发生了变化,但支点与动力作用线间的距离仍然保持不变(力的作用线:通过力的作用点沿力的方向所画的直线,叫做力的作用线).
可见动力的作用效果不是由支点到动力作用点间的长度决定,而是由支点到动力作用线间的距离决定.我们把从支点到动力作用线间的距离叫做动力臂.从支点到阻力作用线间的距离叫做阻力臂.
动力臂 --从支点到动力作用线的距离
--从支点到动力作用线的距离
阻力臂 --从支点到阻力作用线的距离
--从支点到阻力作用线的距离
(板书)
因此,描述杠杆需要五个要素--支点O、动力 、阻力 、动力臂 、阻力臂 ,总称为杠杆的五要素.
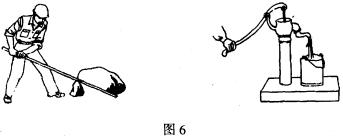
下面请同学们画出图6中杠杆的动力臂 和阻力臂 --撬棒、抽水机(介绍杠杆示意图和力臂的画法,详见书P192图13-2).
2.受到力的作用.动力和阻力
支点O--杠杆绕着转动的点
动力 --使杠杆转动的力
阻力 --阻碍杠杆转动的力(板书)
练习:展示一组图片,思考这些工具在工作过程中,是否是杠杆?若为杠杆,确定支点的位置、动力、阻力作用点和方向.
杠杆的共同点(以撬石头为例)
1.绕着固定点转动.固定点--杠杆的支点
1.引入新课
今天我给大家带来了一些日常生活用的工具,请同学说出这些工具的名称和用途?(出示羊角锤或木工用的起子、剪刀、钳子、食品夹)
这些能给我们提供方便的工具都称为机械.
(展示观察图片)这些物体也是机械,不过比较复杂,称为复杂机械.无论多复杂的机械都是由简单机械组合而成的.学习简单机械的知识是理解复杂机械的基础.
现在,谁帮我一个忙,用这里三种不同的工具(羊角锤、硬棒、钳子)把木块中的钉子拔出来.(探究)
比较用羊角锤拔钉子,用钳子拔钉子,这两种情况用力一样吗?
哪一种工具更省力呢?羊角锤.
我们来描述用羊角锤(或起子)拔钉子的过程.(多媒体演示,加深印象)
首先用羊角锤(或起子)钳住钉帽,然后锤身抵住木块,用力扳手柄,钉子就被拔出来了.
羊角锤是常用的工具,谁知道它是根据什么原理制造的呢.它是根据杠杆原理制造的.那杠杆是怎么一回事呢?今天大家就共同来探究杠杆(板书:探究杠杆).首先,我们来认识什么是杠杆?(板书:一、什么是杠杆).
最简单的杠杆就是撬石头时用的撬棒.(多媒体演示)
小时侯玩的跷跷板也是杠杆.(多媒体演示)
活塞式抽水机的手柄工作时也是杠杆.(多媒体演示)
请思考这三个杠杆有什么共同点?
(探究)学生分组讨论,请组员回答.
①都是硬棒.(软的不行,直的弯的都可以)
②工作过程中都在转动,转动过程中有一点是不动的.
③除固定不动的点外,还要受到两个力的作用,一个能使它转动,另一个阻碍它转动.
总结出:在力的作用下能绕固定点转动的硬棒叫杠杆;得出:支点、动力、阻力的概念(板书出具体内容).
1课时
2.难点 对力臂的引入和理解
解决办法 由实验、再结合图形得到
1.重点杠杆平衡条件
解决办法 通过探索性实验总结出来
8、看实验结论和先前的猜想是否吻合;
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com