2、单摆
单摆分析的基本点,在于探讨其回复力随位移的变化规律。相对原始模型的伸展,一是关于摆长的变化,二是关于“视重加速度”的变化,以及在具体情形中的处理。至于复杂的摆动情形研究,往往会超出这种基本的变形,而仅仅是在分析方法上做适当借鉴。
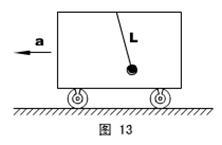 物理情形1:如图13所示,在一辆静止的小车内用长为L的轻绳静止悬挂着一个小钢球,当小车突然获得水平方向的大小为a的加速度后(a<g),试描述小球相对小车的运动。
物理情形1:如图13所示,在一辆静止的小车内用长为L的轻绳静止悬挂着一个小钢球,当小车突然获得水平方向的大小为a的加速度后(a<g),试描述小球相对小车的运动。
模型分析:小钢球相对车向a的反方向摆起,摆至绳与竖直方向夹角θ= arctg 时,达到最大速度,此位置即是小球相对车“单摆”的平衡位置。以车为参照,小球受到的场力除了重力G外,还有一惯性力F 。所以,此时小球在车中相当于处在一个方向倾斜θ、大小变为
时,达到最大速度,此位置即是小球相对车“单摆”的平衡位置。以车为参照,小球受到的场力除了重力G外,还有一惯性力F 。所以,此时小球在车中相当于处在一个方向倾斜θ、大小变为 的新“重力”的作用,属超重情况。这是一种“视重加速度”增加的情形。
的新“重力”的作用,属超重情况。这是一种“视重加速度”增加的情形。
 解说:由于摆长L未变,而g视 =
解说:由于摆长L未变,而g视 =
 ,如果a很小,致使最大摆角不超过5°的话,小角度单摆可以视为简谐运动,周期也可以求出来。
,如果a很小,致使最大摆角不超过5°的话,小角度单摆可以视为简谐运动,周期也可以求出来。
答案:小球以绳偏离竖直方向θ=
arctg的角度为平衡位置做最大摆角为θ的单摆运动,如果θ≤5°,则小球的摆动周期为T = 2π
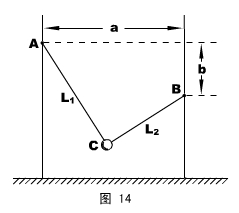
物理情形2:某秋千两边绳子不等长,且悬点不等高,相关数据如图14所示,且有a2 + b2 =  +
+  ,试求它的周期(认为人的体积足够小)。
,试求它的周期(认为人的体积足够小)。
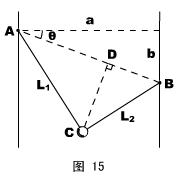 模型分析:用C球替代人,它实际上是在绕AB轴摆动,类似将单摆放置在光滑斜面上的情形。故视重加速度g视 = gcosθ= g
模型分析:用C球替代人,它实际上是在绕AB轴摆动,类似将单摆放置在光滑斜面上的情形。故视重加速度g视 = gcosθ= g ,等效摆长l =
,等效摆长l =  ,如图15所示。
,如图15所示。
由于a2
+ b2 = + 可知,AC⊥CB ,因此不难求出
=  ,最后应用单摆周期公式即可。
,最后应用单摆周期公式即可。
答案:T = 2π 。
。
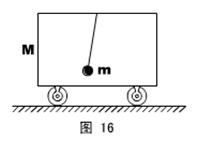
相关变换1:如图16所示,质量为M的车厢中用长为L的细绳悬挂着一个质量为m的小球,车轮与水平地面间的摩擦不计,试求这个系统做微小振动的周期。
 分析:我们知道,证明小角度单摆作简谐运动用到了近似处理。在本题,也必须充分理解“小角度”的含义,大胆地应用近似处理方法。
分析:我们知道,证明小角度单摆作简谐运动用到了近似处理。在本题,也必须充分理解“小角度”的含义,大胆地应用近似处理方法。
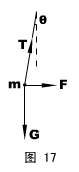
解法一:以车为参照,小球将相对一个非惯性系作单摆运动,在一般方位角θ的受力如图17所示,其中惯性力F = ma ,且a为车子的加速度。由于球在垂直T方向振动,故回复力
F回 = Gsinθ+ Fcosθ= mgsinθ+ macosθ ①
*由于球作“微小”摆动,其圆周运动效应可以忽略,故有
T + Fsinθ≈ mgcosθ ②
再隔离车,有 Tsinθ= Ma ③
 解①②③式得 F回 =
解①②③式得 F回 = 
*再由于球作“微小”摆动,sin2θ→0 ,所以 F回 =  ④
④
令摆球的振动位移为x ,常规处理 sinθ≈ ⑤
⑤
解④⑤即得 F回 =  x
x
显然, = k是恒定的,所以小球作简谐运动。最后求周期用公式即可。
解法二:由于车和球的系统不受合外力,故系统质心无加速度。小球可以看成是绕此质心作单摆运动,而新摆长L′会小于L 。由于质心是惯性参照系,故小球的受力、回复力的合成就很常规了。
若绳子在车内的悬挂点在正中央,则质心在水平方向上应与小球相距x =  Lsinθ,不难理解,“新摆长”L′= L 。(从严谨的意义上来讲,这个“摆长”并不固定:随着车往“平衡位置”靠近,它会加长。所以,这里的等效摆长得出和解法一的忽略圆周运动效应事实上都是一种相对“模糊”的处理。如果非要做精准的运算,不启用高等数学工具恐怕不行。)
Lsinθ,不难理解,“新摆长”L′= L 。(从严谨的意义上来讲,这个“摆长”并不固定:随着车往“平衡位置”靠近,它会加长。所以,这里的等效摆长得出和解法一的忽略圆周运动效应事实上都是一种相对“模糊”的处理。如果非要做精准的运算,不启用高等数学工具恐怕不行。)
答:T = 2π 。
。
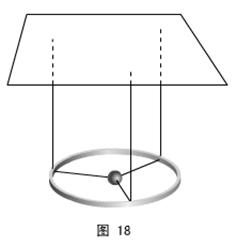 相关变换2:如图18所示,有一个均质的细圆环,借助一些质量不计的辐条,将一个与环等质量的小球固定于环心处,然后用三根竖直的、长度均为L且不可伸长的轻绳将这个物体悬挂在天花板上,环上三个结点之间的距离相等。试求这个物体在水平方向做微小扭动的周期。
相关变换2:如图18所示,有一个均质的细圆环,借助一些质量不计的辐条,将一个与环等质量的小球固定于环心处,然后用三根竖直的、长度均为L且不可伸长的轻绳将这个物体悬挂在天花板上,环上三个结点之间的距离相等。试求这个物体在水平方向做微小扭动的周期。
分析:此题的分析角度大变。象分析其它物理问题一样,分析振动也有动力学途径和能量两种途径,此处若援用动力学途径寻求回复力系数k有相当的难度,因此启用能量分析。
本题的任务不在简谐运动的证明,而是可以直接应用简谐运动的相关结论。根据前面的介绍,任何简谐运动的总能都可以表达为
E =  kA2
①
kA2
①
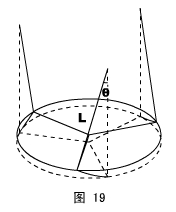 而我们对过程进行具体分析时,令最大摆角为θ(为了便于寻求参量,这里把摆角夸大了)、环和球的质量均为m ,发现最大的势能(即总能)可以表达为(参见图19)
而我们对过程进行具体分析时,令最大摆角为θ(为了便于寻求参量,这里把摆角夸大了)、环和球的质量均为m ,发现最大的势能(即总能)可以表达为(参见图19)
E = 2m·gL(1 − cosθ) ②
且振幅A可以表达为
A = 2Lsin ③
③
解①②③式易得:k = 
最后求周期时应注意,中间的球体未参与振动,故不能纳入振子质量(振子质量只有m)。
答:T = π 。
。
1、弹簧振子
 物理情形:如图8所示,用弹性系数为k的轻质弹簧连着一个质量为m的小球,置于倾角为θ的光滑斜面上。证明:小球在弹簧方向的振动为简谐运动,并求其周期T 。
物理情形:如图8所示,用弹性系数为k的轻质弹簧连着一个质量为m的小球,置于倾角为θ的光滑斜面上。证明:小球在弹簧方向的振动为简谐运动,并求其周期T 。
学生自己证明…。周期T =
2π
模型分析:这个结论表明,弹簧振子完全可以突破放置的方向而伸展为一个广义的概念,且伸展后不会改变运动的实质。其次,我们还可以这样拓展:把上面的下滑力换程任何一个恒力(如电场力),它的运动性质仍然不会改变。
当然,这里的运动性质不变并不是所有运动参量均不改变。譬如,振子的平衡位置、振动方程还是会改变的。下面我们看另一类型的拓展--
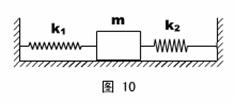
 物理情形:如图9所示,两根相同的弹性系数分别为k1和k2的轻质弹簧,连接一个质量为m的滑块,可以在光滑的水平面上滑动。试求这个系统的振动周期T 。
物理情形:如图9所示,两根相同的弹性系数分别为k1和k2的轻质弹簧,连接一个质量为m的滑块,可以在光滑的水平面上滑动。试求这个系统的振动周期T 。
解说:这里涉及的是弹簧的串、并联知识综合。根据弹性系数的定义,不难推导出几个弹性系数分别为k1、k2、…、kn的弹簧串、并联后的弹性系数定式(设新弹簧系统的弹性系数为k)--
 串联:
串联: =
= 
并联:k = 
在图9所示的情形中,同学们不难得出:T = 2π
 当情形变成图10时,会不会和图9一样呢?详细分析形变量和受力的关系,我们会发现,事实上,这时已经变成了弹簧的并联。
当情形变成图10时,会不会和图9一样呢?详细分析形变量和受力的关系,我们会发现,事实上,这时已经变成了弹簧的并联。
答案:T = 2π 。
。
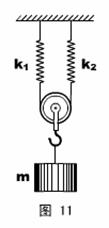
思考:如果两个弹簧通过一个动滑轮(不计质量)再与质量为m的钩码相连,如图11所示,钩码在竖直方向上的振动周期又是多少?
解:这是一个极容易出错的变换--因为图形的外表形状很象“并联”。但经过仔细分析后,会发现,动滑轮在这个物理情形中起到了重要的作用--致使这个变换的结果既不是串联、也不是并联。
★而且,我们前面已经证明过,重力的存在并不会改变弹簧振子的振动方程,所以为了方便起见,这里(包括后面一个“在思考”题)的受力分析没有考虑重力。
具体分析如下:
设右边弹簧的形变量为x2 、滑轮(相对弹簧自由长度时)的位移为x 、钩子上的拉力为F ,则
k1x1 = k2x2
x = 
F = 2 k2x2
解以上三式,得到:F =  x ,也就是说,弹簧系统新的弹性系数k = 。
x ,也就是说,弹簧系统新的弹性系数k = 。
答:T = π 。
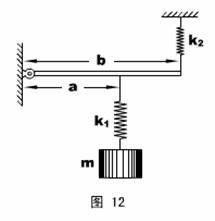 再思考:如果两弹簧和钩码通过轻杆和转轴,连成了图12所示的系统,已知k1 、k2 、m 、a 、b ,再求钩码的振动周期T 。
再思考:如果两弹簧和钩码通过轻杆和转轴,连成了图12所示的系统,已知k1 、k2 、m 、a 、b ,再求钩码的振动周期T 。
思路提示:探讨钩码位移和回复力关系,和“思考”题类似。
(过程备考:设右弹簧伸长x2 ,则中间弹簧伸长x1
=  x2
x2
钩码的位移量x = x1 +  x2
x2
而钩码的回复力F = k1x1
结合以上三式解回复力系数k =  =
=  ,所以…)
,所以…)
答:T = 2π 。
。
 物理情形:如图5所示,将一粗细均匀、两边开口的U型管固定,其中装有一定量的水银,汞柱总长为L 。当水银受到一个初始的扰动后,开始在管中振动。忽略管壁对汞的阻力,试证明汞柱做简谐运动,并求其周期。
物理情形:如图5所示,将一粗细均匀、两边开口的U型管固定,其中装有一定量的水银,汞柱总长为L 。当水银受到一个初始的扰动后,开始在管中振动。忽略管壁对汞的阻力,试证明汞柱做简谐运动,并求其周期。
模型分析:对简谐运动的证明,只要以汞柱为对象,看它的回复力与位移关系是否满足定义式①,值得注意的是,回复力 系指振动方向上的合力(而非整体合力)。当简谐运动被证明后,回复力系数k就有了,求周期就是顺理成章的事。
系指振动方向上的合力(而非整体合力)。当简谐运动被证明后,回复力系数k就有了,求周期就是顺理成章的事。
本题中,可设汞柱两端偏离平衡位置的瞬时位移为x 、水银密度为ρ、U型管横截面积为S ,则次瞬时的回复力
ΣF = ρg2xS = x
由于L、m为固定值,可令: = k ,而且ΣF与x的方向相反,故汞柱做简谐运动。
周期T =
2π= 2π
答:汞柱的周期为2π 。
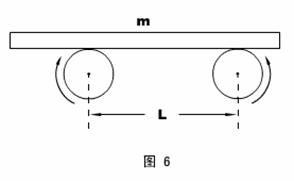 学生活动:如图6所示,两个相同的柱形滚轮平行、登高、水平放置,绕各自的轴线等角速、反方向地转动,在滚轮上覆盖一块均质的木板。已知两滚轮轴线的距离为L 、滚轮与木板之间的动摩擦因素为μ、木板的质量为m ,且木板放置时,重心不在两滚轮的正中央。试证明木板做简谐运动,并求木板运动的周期。
学生活动:如图6所示,两个相同的柱形滚轮平行、登高、水平放置,绕各自的轴线等角速、反方向地转动,在滚轮上覆盖一块均质的木板。已知两滚轮轴线的距离为L 、滚轮与木板之间的动摩擦因素为μ、木板的质量为m ,且木板放置时,重心不在两滚轮的正中央。试证明木板做简谐运动,并求木板运动的周期。
思路提示:找平衡位置(木板重心在两滚轮中央处)→力矩平衡和ΣF6= 0结合求两处弹力→求摩擦力合力…
答案:木板运动周期为2π 。
。
巩固应用:如图7所示,三根长度均为L = 2.00m地质量均匀直杆,构成一正三角形框架ABC,C点悬挂在一光滑水平轴上,整个框架可绕转轴转动。杆AB是一导轨,一电动松鼠可在导轨上运动。现观察到松鼠正在导轨上运动,而框架却静止不动,试讨论松鼠的运动是一种什么样的运动。
 解说:由于框架静止不动,松鼠在竖直方向必平衡,即:松鼠所受框架支持力等于松鼠重力。设松鼠的质量为m ,即:
解说:由于框架静止不动,松鼠在竖直方向必平衡,即:松鼠所受框架支持力等于松鼠重力。设松鼠的质量为m ,即:
N = mg ①
再回到框架,其静止平衡必满足框架所受合力矩为零。以C点为转轴,形成力矩的只有松鼠的压力N、和松鼠可能加速的静摩擦力f ,它们合力矩为零,即:
MN = Mf
现考查松鼠在框架上的某个一般位置(如图7,设它在导轨方向上距C点为x),上式即成:
N·x = f·Lsin60° ②
解①②两式可得:f =  x ,且f的方向水平向左。
x ,且f的方向水平向左。
根据牛顿第三定律,这个力就是松鼠在导轨方向上的合力。如果我们以C在导轨上的投影点为参考点,x就是松鼠的瞬时位移。再考虑到合力与位移的方向因素,松鼠的合力与位移满足关系--
= -k
其中k = ,对于这个系统而言,k是固定不变的。
显然这就是简谐运动的定义式。
答案:松鼠做简谐运动。
评说:这是第十三届物理奥赛预赛试题,问法比较模糊。如果理解为定性求解,以上答案已经足够。但考虑到原题中还是有定量的条件,所以做进一步的定量运算也是有必要的。譬如,我们可以求出松鼠的运动周期为:T = 2π = 2π = 2.64s 。
= 2.64s 。
6、声波
a、乐音和噪音
b、声音的三要素:音调、响度和音品
c、声音的共鸣
第二讲 重要模型与专题
5、多普勒效应
当波源或者接受者相对与波的传播介质运动时,接收者会发现波的频率发生变化。多普勒效应的定量讨论可以分为以下三种情况(在讨论中注意:波源的发波频率f和波相对介质的传播速度v是恒定不变的)--
a、只有接收者相对介质运动(如图3所示)
设接收者以速度v1正对静止的波源运动。
如果接收者静止在A点,他单位时间接收的波的个数为f ,
 当他迎着波源运动时,设其在单位时间到达B点,则
当他迎着波源运动时,设其在单位时间到达B点,则 = v1
,、
= v1
,、
在从A运动到B的过程中,接收者事实上“提前”多接收到了n个波
n =  =
=  =
= 
显然,在单位时间内,接收者接收到的总的波的数目为:f + n =  f ,这就是接收者发现的频率f1 。即
f ,这就是接收者发现的频率f1 。即
f1 = f
显然,如果v1背离波源运动,只要将上式中的v1代入负值即可。如果v1的方向不是正对S ,只要将v1出正对的分量即可。
b、只有波源相对介质运动(如图4所示)
设波源以速度v2正对静止的接收者运动。
 如果波源S不动,在单位时间内,接收者在A点应接收f个波,故S到A的距离:
如果波源S不动,在单位时间内,接收者在A点应接收f个波,故S到A的距离: = fλ
= fλ
在单位时间内,S运动至S′,即 = v2
。由于波源的运动,事实造成了S到A的f个波被压缩在了S′到A的空间里,波长将变短,新的波长
= v2
。由于波源的运动,事实造成了S到A的f个波被压缩在了S′到A的空间里,波长将变短,新的波长
λ′=  =
=  =
=  =
= 
而每个波在介质中的传播速度仍为v ,故“被压缩”的波(A接收到的波)的频率变为
f2 =  =
=  f
f
当v2背离接收者,或有一定夹角的讨论,类似a情形。
c、当接收者和波源均相对传播介质运动
当接收者正对波源以速度v1(相对介质速度)运动,波源也正对接收者以速度v2(相对介质速度)运动,我们的讨论可以在b情形的过程上延续…
 f3 =
f2 =
f3 =
f2 =  f
f
关于速度方向改变的问题,讨论类似a情形。
4、波的反射、折射和衍射
知识点和高考要求相同。
3、波的干涉
a、波的叠加。几列波在同一介质种传播时,能独立的维持它们的各自形态传播,在相遇的区域则遵从矢量叠加(包括位移、速度和加速度的叠加)。
 b、波的干涉。两列波频率相同、相位差恒定时,在同一介质中的叠加将形成一种特殊形态:振动加强的区域和振动削弱的区域稳定分布且彼此隔开。
b、波的干涉。两列波频率相同、相位差恒定时,在同一介质中的叠加将形成一种特殊形态:振动加强的区域和振动削弱的区域稳定分布且彼此隔开。
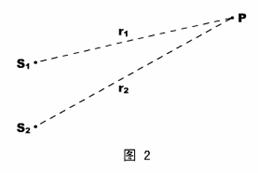
我们可以用波程差的方法来讨论干涉的定量规律。如图2所示,我们用S1和S2表示两个波源,P表示空间任意一点。
当振源的振动方向相同时,令振源S1的振动方程为y1 = A1cosωt ,振源S1的振动方程为y2 = A2cosωt ,则在空间P点(距S1为r1
,距S2为r2),两振源引起的分振动分别是
y1′= A1cos(ω(t −  ))
))
y2′= A2cos(ω(t −  ))
))
P点便出现两个频率相同、初相不同的振动叠加问题(φ1 =  ,φ2 =
,φ2 =  ),且初相差Δφ=
),且初相差Δφ=  (r2 – r1)。根据前面已经做过的讨论,有
(r2 – r1)。根据前面已经做过的讨论,有
r2 − r1 = kλ时(k = 0,±1,±2,…),P点振动加强,振幅为A1 + A2 ;
r2 − r1 =(2k − 1) 时(k = 0,±1,±2,…),P点振动削弱,振幅为│A1-A2│。
时(k = 0,±1,±2,…),P点振动削弱,振幅为│A1-A2│。
2、机械波的描述
a、波动图象。和振动图象的联系
b、波动方程
如果一列简谐波沿x方向传播,振源的振动方程为y = Acos(ωt + φ),波的传播速度为v ,那么在离振源x处一个振动质点的振动方程便是
y
= Acos(ωt + φ -  ·2π)= Acos(ω(t -
·2π)= Acos(ω(t -  )+ φ)
)+ φ)
这个方程展示的是一个复变函数。对任意一个时刻t ,都有一个y(x)的正弦函数,在x-y坐标下可以描绘出一个瞬时波形。所以,称y = Acos(ω(t - )+ φ)为波动方程。
1、波的产生和传播
产生的过程和条件;传播的性质,相关参量(决定参量的物理因素)
6、阻尼振动、受迫振动和共振
和高考要求基本相同。
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com