12.某同学设计的机器人每秒钟前进或后退一步,他设计的程序是让机器人总是以前进3步,然后再后退2步的规律移动。假设将此机器人放在数轴的原点,面向正方向,以1步的距离为1单位长移动。令p(n)表示第n秒时机器人所在位置的坐标,且p(0)=0,则下列结论中错误的是 ( )
A.p(3)=3 B.p(5)=1 C.p(101)=21 D.p(101)>p(104)
第Ⅱ卷(非选择题,共90分)
11.设 的所有x之积为 ( )
的所有x之积为 ( )
A.-4 B.-2 C.0 D.2
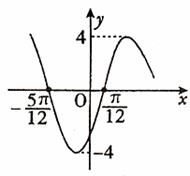
10.已知函数 的导函数
的导函数 的图象如图所示,则
的图象如图所示,则 的表达式为 ( )
的表达式为 ( )
A. B.
B. C.
C. D.
D.
9.双曲线 的两个焦点为F1、F2,若P为其上一点,且|PF1|=3|PF2|,则该双曲线离心率的取值范围为 ( )
的两个焦点为F1、F2,若P为其上一点,且|PF1|=3|PF2|,则该双曲线离心率的取值范围为 ( )
A.(1,2) B. C.
C. D.
D.
8.已知三条直线l、m、n,三个平面α、β、γ,有以下四个命题:
①α⊥β、 ②
② 、
、
③
④ 、m、n交于一点
、m、n交于一点
其中正确命题的序号为 ( )
A.①② B.①②③ C.③④ D.④
7.已知正六棱锥的底面边长为3,侧棱长为 ,则该正六棱锥的外接球的表面积为( )
,则该正六棱锥的外接球的表面积为( )
A.108π B.72π C.36π D.12π
6.“a=1”是“函数 上是增加的”的 ( )
上是增加的”的 ( )
A.充分不必要条件 B.必要不充分条件
C.充要条件 D.既不充分也不必要条件
5.设随机变量 等于 ( )
等于 ( )
A. B.
B. C.
C. D.
D.
4.若 ,则 ( )
,则 ( )
A. B.
B.
C. D.
D.
3.已知向量 夹角是 ( )
夹角是 ( )
A.30° B.60° C.120° D.150°
湖北省互联网违法和不良信息举报平台 | 网上有害信息举报专区 | 电信诈骗举报专区 | 涉历史虚无主义有害信息举报专区 | 涉企侵权举报专区
违法和不良信息举报电话:027-86699610 举报邮箱:58377363@163.com